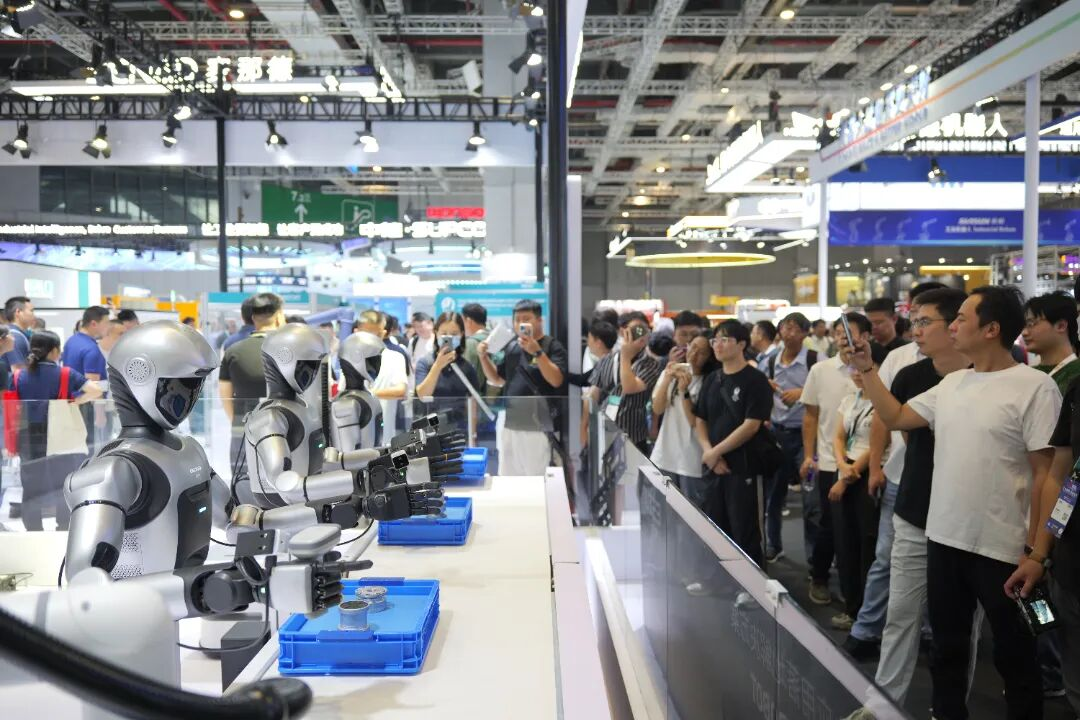
在2025年上海工博会上,埃斯顿酷卓以“具身智能·智领未来”为主题,展示了以“快慢系统”协同架构为核心的具身智能机器人工业应用落地解决方案。该方案集成了双臂人形机器人、轮式人形机器人、协作机器人、PLC 控制以及智能化算法,完整演示了从工件上料、扫码、装配到智能搬运的具身智能多形态、复杂任务应用落地全流程。
在2025年上海工博会上,埃斯顿酷卓以“具身智能·智领未来”为主题,展示了以“快慢系统”协同架构为核心的具身智能机器人工业应用落地解决方案。该方案集成了双臂人形机器人、轮式人形机器人、协作机器人、PLC 控制以及智能化算法,完整演示了从工件上料、扫码、装配到智能搬运的具身智能多形态、复杂任务应用落地全流程。
快慢系统双引擎协同架构
人形机器人的控制由快慢系统协同实现。慢系统作为“决策大脑”,依托视觉语言大模型解析场景图像与文本指令,完成环境理解与任务规划。例如在抓取扫码环节,大模型可实时识别工件与二维码,规划最优抓取轨迹。快系统则作为“执行小脑”,采用流匹配策略,依托Transformer模型架构,将抽象指令转化为关节级精确动作,确保运动轨迹的丝滑衔接。

多机器人协同工业场景
现场演示的流水线由三大模块构成:协作机械臂完成上料后,双臂人形机器人通过慢系统解析工件特征,快系统驱动灵巧手完成精准抓取与扫码;另一台人形机器人在预训练的流匹配策略基础上,通过强化学习优化装配策略,完成零件组装;最终,轮式人形机器人将物料筐搬运至货架指定位置。

埃斯顿酷卓已成功研发三款不同形态的人形机器人产品,依托“快慢系统”双引擎协同架构,凭借强大的系统协同能力,实现从单一工序到全流程智能化的无缝衔接,覆盖更多工业应用场景,为制造业提供了可扩展、可升级的柔性生产新范式。

在2025年上海工博会上,埃斯顿酷卓以“具身智能·智领未来”为主题,展示了以“快慢系统”协同架构为核心的具身智能机器人工业应用落地解决方案。该方案集成了双臂人形机器人、轮式人形机器人、协作机器人、PLC 控制以及智能化算法,完整演示了从工件上料、扫码、装配到智能搬运的具身智能多形态、复杂任务应用落地全流程。
在2025年上海工博会上,埃斯顿酷卓以“具身智能·智领未来”为主题,展示了以“快慢系统”协同架构为核心的具身智能机器人工业应用落地解决方案。该方案集成了双臂人形机器人、轮式人形机器人、协作机器人、PLC 控制以及智能化算法,完整演示了从工件上料、扫码、装配到智能搬运的具身智能多形态、复杂任务应用落地全流程。
快慢系统双引擎协同架构
人形机器人的控制由快慢系统协同实现。慢系统作为“决策大脑”,依托视觉语言大模型解析场景图像与文本指令,完成环境理解与任务规划。例如在抓取扫码环节,大模型可实时识别工件与二维码,规划最优抓取轨迹。快系统则作为“执行小脑”,采用流匹配策略,依托Transformer模型架构,将抽象指令转化为关节级精确动作,确保运动轨迹的丝滑衔接。
多机器人协同工业场景
现场演示的流水线由三大模块构成:协作机械臂完成上料后,双臂人形机器人通过慢系统解析工件特征,快系统驱动灵巧手完成精准抓取与扫码;另一台人形机器人在预训练的流匹配策略基础上,通过强化学习优化装配策略,完成零件组装;最终,轮式人形机器人将物料筐搬运至货架指定位置。
埃斯顿酷卓已成功研发三款不同形态的人形机器人产品,依托“快慢系统”双引擎协同架构,凭借强大的系统协同能力,实现从单一工序到全流程智能化的无缝衔接,覆盖更多工业应用场景,为制造业提供了可扩展、可升级的柔性生产新范式。